Sección 5.4 Sistemas de Ecuaciones Lineales I (Introducción)
Definición 5.4.1.
Un sistema de ecuaciones lineales de \(m\) ecuaciones y \(n\) variables es una lista de ecuaciones de la formaO de manera más sencilla: \(A\vec{x}=\vec{b}\text{;}\) con \(A\in \mathcal{M}_{m\times n}(F)\text{,}\) \(\vec{x}\in \mathcal{M}_{n\times 1}(F)\) y \(\vec{b}\in \mathcal{M}_{m\times 1}(F)\text{.}\)
Definición 5.4.2.
Una solución del sistema lineal de ecuaciones \(A\vec{x}=\vec{b}\) es un vector columnaEjemplo 5.4.3.
Esto, pues basta realizar la multiplicación de matrices correspondientes; para evidenciar que
Observación 5.4.4.
Un sistema lineal de ecuaciones (de la Definición 5.4.1) puede poseer tres tipos de soluciones (no son simultaneas):- Solución única.
- Soluciones infinitas.
- Sin solución.
Observación 5.4.5.
Los sistemas de ecuaciones lineales pueden interpretarse de manera geométrica.
De la Definición 5.4.1, si \(m=n=2\text{;}\) se tendrá un sistema de orden \(2\times 2\text{.}\) Es decir, de dos incognitas y ecuaciones. Tal sistema, es de la forma
De Geometría Análitica, sabemos que \(\ell_{1}:a_{11}x_{1}+a_{12}x_{2}=b_{1}\) y \(\ell_{2}:a_{21}x_{1}+a_{22}x_{2}=b_{2}\) corresponden a dos rectas en \(\mathbb{R}^{2}.\) Dependiendo de las gráficas de ambas rectas, es posible determinar si el sistema en particular tiene solución o no. Se sigue que
- \(\ell_{1}\) y \(\ell_{2}\) se intersectan en un solo punto. Esto implica que el sistema posee solución única.
- \(\ell_{1}\) y \(\ell_{2}\) son rectas coincidentes ( \(\ell_{1}=\ell_{2}\)). Esto implica que el sistema posee infinitas soluciones.
- \(\ell_{1}\) y \(\ell_{2}\) son rectas paralelas. Esto implica que el sistema no posee solución.
¿Cómo resolver un sistema lineal de ecuaciones? Podemos evocar técnicas aprendidas durante la Enseñanza Media (sustitución, reducción o igualación).
Desafortunadamente, dichas estrategias no suelen ser muy efectivas a la hora de trabajar con un sistema de orden \(m\times n\) ( \(m\) incognitas y \(n\) ecuaciones). Sin embargo, pueden emplearse de manera astuta. Considere el Ejemplo 5.4.6.
Ejemplo 5.4.6.
Resolveremos el sistema en cuestión. Se multiplicará por 4 la ecuación (1). De esta forma, se tendrá
Sumando (1) y (3), se obtiene
De (5), se sabe que \(2y-8z=8\text{.}\) Esto implica que \(y=16.\)
Para determinar la variable \(x\text{,}\) se puede reemplazar los valores de \(z\) e \(y\) obtenidos en (1) o (3). En particular, se reemplazará en (1). Por lo tanto
Note que el vector columna
Para resolver el sistema del Ejercicio 5.5.6 se utilizaron las siguientes operaciones:
- Multiplicar una ecuación por una constante no nula.
- Intercambiar dos ecuaciones.
- Sumar a una ecuación un múltiplo de otra ecuación.
Estas técnicas corresponden a las operaciones elementales filas; definidas en la seccíón anterior (Operaciones Elementales Filas y Matrices Escalonadas).
El objetivo del presente capítulo es proporcionar un mecánismo que permita resolver sistemas de ecuaciones lineales recurriendo al mécanismo de operaciones elementales filas (Gauss - Jordan). Pero antes, es necesario introducir el concepto de matriz ampliada.
Definición 5.4.7.
(Matriz Ampliada) Considere el sistema de ecuaciones lineales de \(m\) ecuaciones y \(n\) variables: \(A\vec{x}=\vec{b}\text{,}\) de la Definición 5.4.1.Se define la matriz ampliada asociada a dicho sistema de ecuaciones, como el arreglo matricial
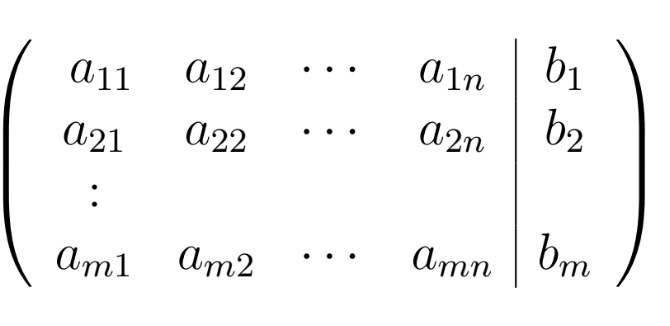
La matriz ampliada asociada al sistema de ecuaciones \(A\vec{x}=\vec{b}\text{,}\) se denotará como \((A:b).\)
Ejemplo 5.4.9.
La matriz ampliada asociada con el sistema de ecuaciones está dada por
A la hora de resolver un sistema de resolver un sistema de ecuaciones lineales mediante Gauss - Jordan (realizar operaciones elementales filas), el uso de la matriz ampliada será clave. Y más aun, pues está involucrada en el Teorema de Rouché - Fröbenius.